IB Computer Science
Mr. McLain is very proud to be preparing Computer Science as part of Riverdale's IB Candidacy. Upon authorization, it will be one of very few such programs in the area.
 Technology with Mr. McLain
Technology with Mr. McLain
 Our lab before the redo in 2018.
Our lab before the redo in 2018.
 Our lab after the 2018 redo: Thanks to the Hillman Foundation!
Our lab after the 2018 redo: Thanks to the Hillman Foundation!
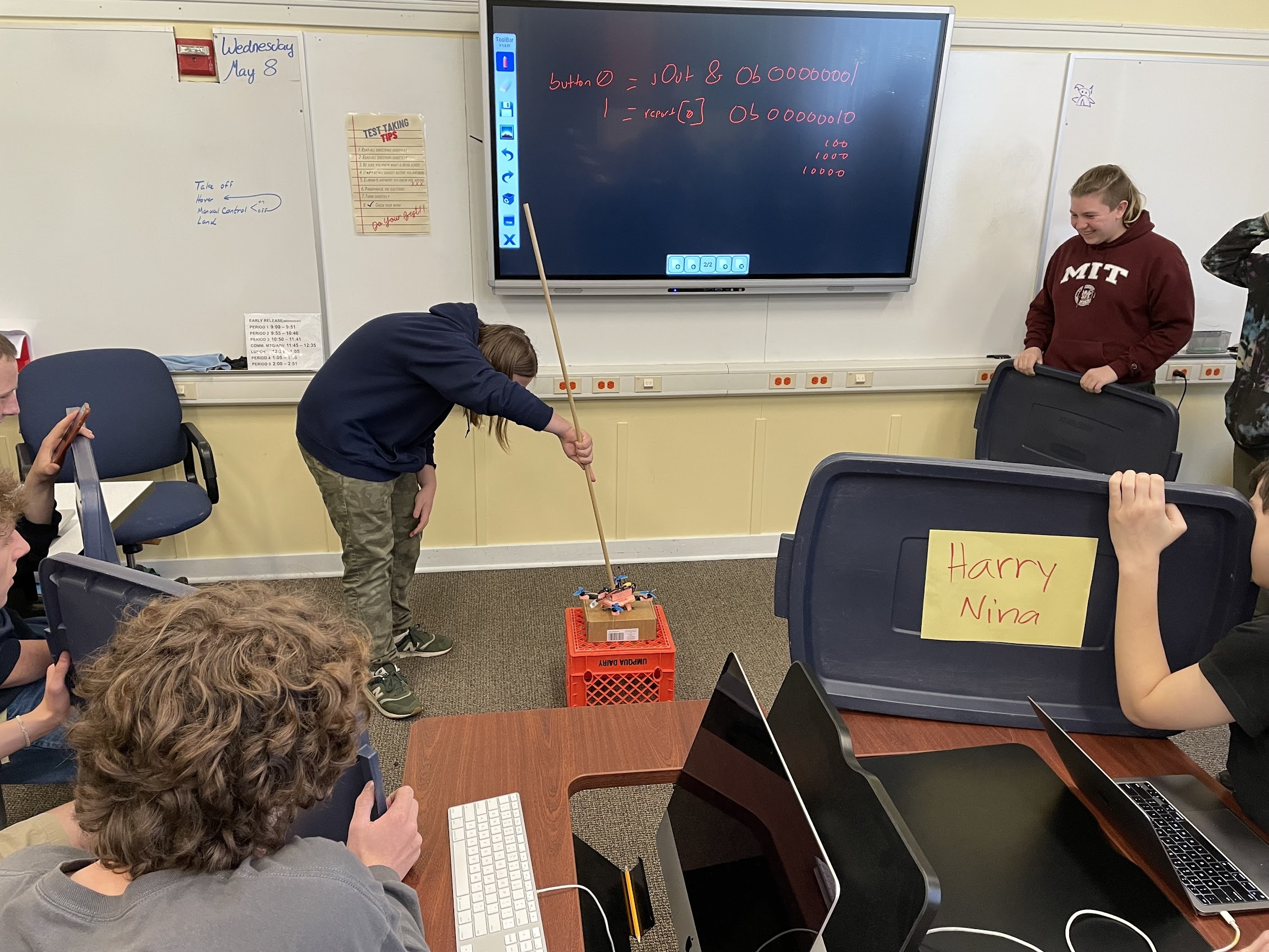 XV: Swarm part 1: A cautious rotor test.
XV: Swarm part 1: A cautious rotor test.

| Current Classes: Trimester 2 | |
|---|---|
| Period | Course |
| 1 | Physical Computing |
| 2 | Computer Science Principles |
| 3 | Prep |
| 4 | 3D Modeling and Animation |
| 5 | Web Design 1: HTML/CSS |
Mr. McLain is very proud to be preparing Computer Science as part of Riverdale's IB Candidacy. Upon authorization, it will be one of very few such programs in the area.
Learn how computers manage to do so much with so very little -- and just how little that really is. Recognize the connections between ancient solutions and today's powerful devices. And along the way get a firm foundation in programming skills.

Gain knowledge and skills to understand the modern threats to computer systems and some of the tools professionals use to harden systems against those threats and methods of detection and response against attacks.
Mr. McLain recently completed a Masters in Cybersecurity and Information Assurance (MSCSIA). Note: Students must sign an ethical hacking agreement to participate in this course.
This is the heart of our state-recognized CTE program. In the first course of the series, students get lots of hands-on time to learn key skills to design and build gorgeous web sites from scratch that have a dynamic feel to it. Add real dynamics and functional applications in the second course of the series: Javascript. Finally, in Server-Side Applications, students will explore building the kind of web site that allows users to log in from anywhere, interact with information specific to them, and some key techniques to build them securely. Students work PHP, Javascript, and SQL databases in this class.

Students learn to use the Unity game engine with programming in C# to build video games. Work in level design, game mechanics, enemy behavior and quality game structure are all addressed, with recognition that top-level games are built by large teams of specialized, experienced professionals over months and years. Two levels of Game design are offered, plus a course dedicated to 3D Modeling and Animation using Blender. You can see a few exmaples of student-developed games in our Game Gallery
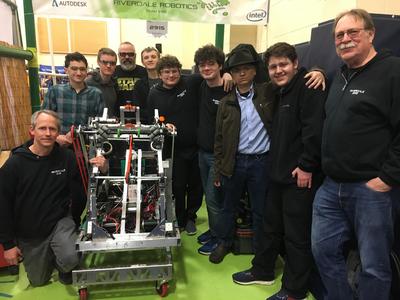
The robotics program gets its start with small Vex robots in Robotics 1: Introduction. Students start by following instructions and learning the ways different parts work together. Then they take on a series of challenges as teams, thinking up and building solutions to problems, then competing against other teams to see how well their ideas worked. The Robotics Projects and Robotics Programming classes extend on these ideas, working with the robots bult by Riveradle's FRC Robotics team: Pandamonium.

Students learn how to build 3D models using Autodesk's Fusion 360 software. They experience bringing those models into the real world through our 3D Printers, and learn about different filaments, design considerations for 3D prints, and more advanced techniques, including printing working hinges in place.

This course brings together the manual art of the Studio and the digital tools of the computer lab. Co-taught by Mr. McLain and our art teacher Mr. Orton, students learn to integrate the full range of tools into their workflow. We use physical manufacturing tools like 3D Printers and a Glowforge laser cutter to bring the designs into the real world and look at the advantages those processes offer.
Tech Survey is a course for all Freshman students. The goal is to give them the key computing skills essential for a 21st century student and to introduce students to the programs offered here in the computer lab. I want them to be skilled with a full-scale operating system, to be fascinated by what is posible with these amazing creative tools, and to be confident they will be successful when they come back to the lab later in high school.
XV is a student-led, project driven class. Each year, students propose projects for the next year's XV class, and, if chosen, spend one trimester preparing and then one trimester leading the project for a class with the support of Mr. McLain. Past projects have included data collection using weather balloons, submersible ROV deployments off the Oregon Coast, self-driving model cars, drones, and more.

With its debut in the 2023-24 school year, Tech for a Better World introduced the idea of problem-based learning. Tech for a Better World focused on ALS in its first year. Students learned about ALS through readings and videos, heard from representatives of the ALS Association about the disease, and met a person living with ALS and their caregiver. Then they went through a process of identifying challenges for patients and loved ones, and imagined possible technological solutions that might address some of those challenges.
The remainder of the trimester was psent creating prototypes for those solutions before presenting again to the ALS Association representatives.
Shown here is the class learning about the kind of wheelchair so many ALS patients spend their time in.